Наука
Опис найбільш ефективних розробок
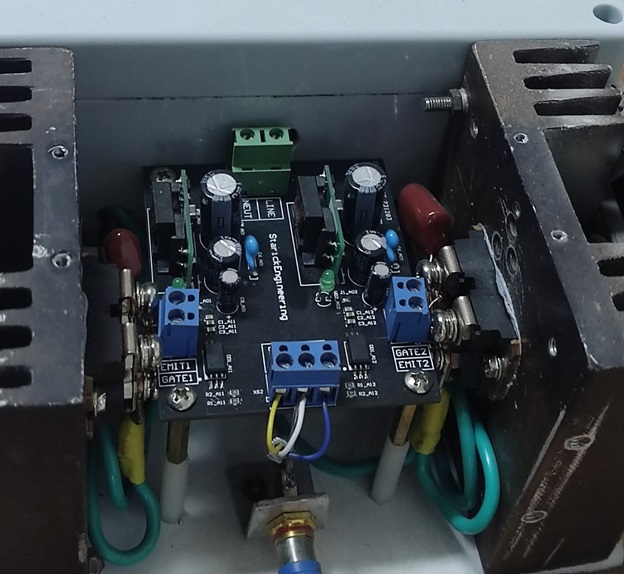
ПЕРЕТВОРЮВАЧ ЧАСТОТИ НА ОСНОВІ РЕЗОНАНСНОГО ІНВЕРТОРУ З ЧАСО-ІМПУЛЬСНИМ КЕРУВАННЯМ
Автори: Г.В. Павлов, І.Л. Вінниченко, М.В. Покровський.
Основні характеристики, суть роботи: Роботу спрямовано на розробку та дослідження перетворювача частоти для вторинного живлення чутливих до несинусоїдності вхідної напруги споживачів бортової мережі автономних рухомих та локальних об’єктів з метою підвищення надійності, енергетичної та економічної ефективності пристрою. В рамках роботи вирішуються задачі вибору структури перетворювача частоти, розробки закону імпульсного керування, що дозволить отримати синусоїдальну форму вихідної напруги при навантаженні змінного під час роботи характеру, розробки методики розрахунку елементів схеми перетворювача, математичне та імітаційне моделювання, виготовлення та дослідження експериментального зразка.
Патентно-конкурентоспроможні результати: Отримано 1 патент на корисну модель України та подано заявку на патент на корисну модель України.
Порівняння із світовими аналогами:
Порівняльний аналіз напрямку досліджень, підходів, робочих ідей та доробку авторів проекту дозволяє стверджувати, що очікувані результати будуть вагомі на світовому рівні. Запропонований спосіб керування дозволить значно знизити рівень динамічних втрат силових ключових елементів перетворювача, що дозволить підвищити ККД пристрою. Також використання резонансного інвертора у складі перетворювача дозволить знизити рівень генерованих електромагнітних завад, а використання у його структурі коректору коефіцієнта потужності забезпечить електромагнітну сумісність пристрою із мережею. Розроблена методика розрахунку параметрів накопичуючих лементів схеми дозволить здійснювати розрахунок параметрів будь-якого перетворювача з послідовною резонансною ланкою та вихідним низькочастотним LC-фільтром.
Економічна привабливість: Собівартість високоефективного перетворювача частоти за рахунок запропонованого способу керування та резонансного принципу роботи є нижчою за імпульсні аналоги такої ж потужності, так як він потребує більш дешевої елементної бази через уникнення перенапруг на ключових елементах схеми. Крім того, малі масогабаритні показники пристрою роблять його зручним при використанні у мобільних автономних об’єктах, вантажопідйомність яких обмежена.
Структури, де планується реалізувати результати розробки: Судна різного призначення.
Стан готовності розробок: Завершальний етап розробки.
Результати впровадження: Окремі елементи системи впроваджені в Інституті імпульсних процесів і технологій НАН України, м. Миколаїв
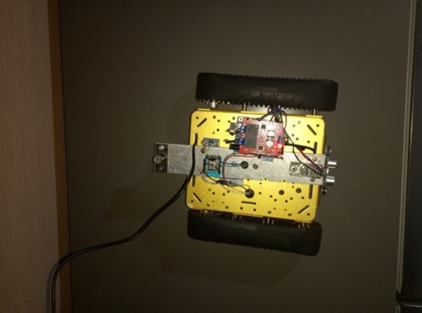
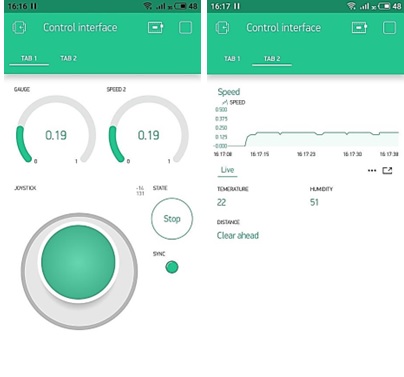
РОЗРОБКА КОМП’ЮТЕРИЗОВАНОЇ СИСТЕМИ МОНІТОРИНГУ ТА АВТОМАТИЧНОГО КЕРУВАННЯ МОБІЛЬНИМ РОБОТОМ БАГАТОЦІЛЬОВОГО ПРИЗНАЧЕННЯ НА ОСНОВІ ІНТЕЛЕКТУАЛЬНИХ ТЕХНОЛОГІЙ
Автори: О.В. Козлов, О.С. Герасін, А.М. Топалов.
Основні характеристики, суть роботи: Роботу спрямовано на розробку та дослідження комп’ютеризованої системи моніторингу та автоматичного керування мобільним роботом багатоцільового призначення (МРБП) з метою підвищення надійності, енергетичної та економічної ефективності процесів його переміщення та виконання заданих технологічних операцій на похилих та вертикальних феромагнітних поверхнях. Зокрема, в рамках даного проекту на поточному етапі роботи вирішувалися задачі розробки розгалуженої функціональної структури, математичних та імітаційних моделей, зокрема з використанням інтелектуальних технологій. Протягом наступних етапів проекту планується розробка алгоритмів керування та оптимізованих інтелектуальних керуючих пристроїв, експериментального дослідного зразка, а також розвиненого людино-машинного інтерфейсу комп’ютеризованої системи моніторингу та автоматичного керування МРБП, який застосовується для виконання декількох різнотипних технологічних операцій на похилих та вертикальних феромагнітних поверхнях. Також планується розробка ефективних та надійних програмно-апаратних засобів реалізації та практичних рекомендацій з проектування та налаштування комп’ютеризованої системи моніторингу та автоматичного керування МРБП. Застосування запропонованої комп’ютеризованої системи моніторингу та автоматичного керування МРБП на основі інтелектуальних технологій та сучасних програмно-апаратних засобів дозволить значно підвищити енергоефективність, надійність та економічні показники переміщення та виконання заданих технологічних операцій.
Патентно-конкурентоспроможні результати: Отримано 2 патенти України на корисну модель.
Порівняння із світовими аналогами:
Порівняльний аналіз напрямку досліджень, підходів, робочих ідей та доробку авторів проекту дозволяє стверджувати, що отримані результати є досить вагомими на світовому рівні. Розгалужена функціональна структура, адекватні математичні та імітаційні моделі, оптимізовані інтелектуальні керуючі пристрої та алгоритми керування, надійні програмно-апаратні засоби та експериментальний зразок комп’ютеризованої системи моніторингу та автоматичного керування МРБП мають ознаки наукової новизни. Результати виконання проекту відповідають кращим результатам світового рівня в галузі автоматизації процесів керування та виконання різнотипних обслуговуючих технологічних операцій. Отримані новітні наукові досягнення та інноваційні технології можуть бути впроваджені у промисловість України для підвищення конкурентної спроможності в різних галузях виробництва за рахунок автоматизації.
Економічна привабливість: Заміна бригад робітників одним-двома операторами з керування та обслуговування групи МРБП дозволить знизити в рази витрати на заробітну плату та соціальне забезпечення, а також робочий час на встановлення монтажних лісів для роботи на висоті при збільшенні можливого робочого часу для МРБП.
Структури, де планується реалізувати результати розробки: Суднобудівельні та судноремонтні заводи, порти, елеватори, нафтобази.
Стан готовності розробок: На завершальному етапі.
Результати впровадження: Отримані науково-практичні результати проекту можуть бути ефективно впроваджені при серійному виробництві автоматизованих МРБП. Позитивний ефект від впровадження розроблених засобів підвищення енергоефективності, продуктивності та надійності процесів переміщення та виконання МРБП заданих технологічних операцій здатен досить швидко окупити витрати на закупівлю необхідних матеріалів та виконання проектних робіт за даною НДР. Крім того, в подальшому такий МРБП буде приносити прибуток. Вирішення задач, які регламентуються технічним завданням, дозволило підвищити якісні показники та оптимізувати параметри керуючих пристроїв, усунути ризики для життя та здоров’я людини при виконанні робіт у агресивних та небезпечних умовах на висоті, підвищити ефективність виконання декількох заданих технологічних операцій різними робочими органами на спільній транспортній платформі, а також знизити загальні втрати. Заміна бригад робітників одним-двома операторами з керування та обслуговування МРБП дозволить знизити в рази витрати на заробітну плату та соціальне забезпечення, а також робочий час на встановлення монтажних лісів для роботи на висоті при збільшенні можливого робочого часу для МРБП. Один МРБП із розробленою на основі інтелектуальних технологій системою керування здатний замінити робітників для виконання операції очищення, зварювання або нанесення покриття. Економічний ефект від впровадження на практиці отриманих результатів проекту у значній мірі перевищує витрати на фінансування проекту. Зі збільшенням кількості МРБП, в яких будуть впроваджені рекомендації і технічні рішення, розроблені в проекті, економічний ефект відповідно зростатиме. Крім того збільшиться енергоефективність процесів переміщення та виконання заданих технологічних операцій в порівнянні з вітчизняними та зарубіжними аналогами. Окремі результати роботи впроваджено та опубліковано у провідних наукових виданнях.
ЕНЕРГОЕФЕКТИВНИЙ КЕРОВАНИЙ ЕЛЕКТРОМАГНІТНИЙ ПРИВОД ВІБРАЦІЙНОГО ОБЛАДНАННЯ


Автори: О.О. Черно, А.М. Топалов, С.П. Роботько, А.В. Іванов, А.Ю. Козлов.
Основні характеристики, суть роботи, сфера застосування та очікувана ефективність: Ідея розробки полягає у автоматичному керуванні частотою та амплітудою вібраційних пристроїв з електромагнітним приводом з метою забезпечення їх максимальної ефективності. В сільському господарстві та машинобудуванні електромагнітний привод застосовується на вібраційному обладнанні для дозованої подачі, очищення, калібрування та інших технологічних операцій з сипкою речовиною, які вимагають плавного регулювання амплітуди вібрації. Більшість приводів є керованими тільки за амплітудою і працюють в дорезонансному режимі з ККД близько 30...40%. Застосування розроблених приводів з керуванням за амплітудою та частотою забезпечує стійкий резонансний режим роботи з ККД близько 90% і дає можливість заощаджувати на електроенергії близько $100/рік на 1 кВт потужності обладнання. У будівництві вібраційні технології використовуються для ущільнення бетонних сумішей при формуванні залізобетонних плит, бетонних плиток та інших виробів. Для підвищення якості виробів до європейських норм, в останні часи застосовується вібрування з підвищеною частотою (80...100 Гц). Розраховані на таку частоту відцентрові електровібратори мають робочий ресурс лише 200 годин, тому вібраційне обладнання підвищеної частоти з відцентровим приводом потребує заміни вібраторів близько 10 разів на рік. Електромагнітний привод, незалежно від частоти, має робочий ресурс більше 10 років, а його ККД при автоматичному керуванні на 10...20% вище, ніж у відцентрового. Враховуючи це, при заміні відцентрових вібраційних приводів керованими електромагнітними приводами, очікуваний річний економічний ефект складає близько $2000 на 1 кВт потужності обладнання.
Отримані патенти та подані заявки на винахід у період з 2018-2026 рр.
1. Патент України на корисну модель № 122417. Спосіб автоматичного контролю рівня рідини з розподіленим по висоті резервуара дискретним самотестуванням та компенсацією похибки вимірювання / Кондратенко Ю. П., Козлов О. В., Кондратенко Г. В., Коробко О. В., Топалов А. М., Герасін О. С. – № u201706248; заявл. 19.06.2017; опубл. 10.01.2018, Бюл. № 1.
2. Патент України на корисну модель № 123630. Система автоматичного контролю рівня рідини з розподіленим по висоті резервуара дискретним самотестуванням та компенсацією похибки вимірювання / Кондратенко Ю. П., Козлов О. В., Коробко О. В. – № u201701688; заявл. 22.02.2017; опубл. 12.03.2018, Бюл. № 5.
3. Патент України на корисну модель № 125523. Колесо-рушій мобільного робота / Ю.П. Кондратенко, Ю.М. Запорожець, О.С. Герасін, Г.В. Кондратенко. – № u 2017 12633; заявл. 19.12.2017; опубл. 10.05.2018, Бюл. № 9.
4. Патент України на корисну модель № 126444. Спосіб магнітокерованого переміщення мобільного робота / Ю.П. Кондратенко, Ю.М. Запорожець, О.С. Герасін, М.О. Таранов. – № u 2017 12632; заявл. 19.12.2017; опубл. 25.06.2018, Бюл. № 12.
5. Патент України на корисну модель № 160411. Пристрій для вимірювання і контролю товщини напилення у вакуумній камері / Тростинський М.М., Герасін О.С., Карпеченко А.А., Топалов А.М., Бобров М.М., Поворознюк О.С., Угольніков Г.Г. – № u202402960, заявл. 04.06.2024; опубл. 10.09.2025, Бюл. № 37. – 8 с.
6. Спосіб термогазодинамічного розрахунку відцентрового компресора. Патент України на корисну модель № 150323. / С.С. Рижков; Б. Ненгджун; Я. Сяолін; А.М. Топалов; О.С. Герасін. – № u202101983; заявл. 15.04.2021; опубл. 02.02.2022, Бюл. № 5.
7. Інформаційно-розрахунковий комплекс проектування відцентрового компресора. Патент України на корисну модель № 150412. / С.С. Рижков; Б. Ненгджун; Я. Сяолін; А.М. Топалов; О.С. Герасін; О.В. Козлов. – № u 202104173; заявл. 16.07.2021; опубл. 16.02.2022, Бюл. № 7.
8. Спосіб напилення композиційного електродугового покриття. Патент України на корисну модель № 148607. / Карпеченко А.А., Бобров М.М., Герасін О.С., Галинкін Ю.М., Слободян С.О., Михайлов М.С., Лабарткава О.В. – № u 2021 02010; заявл. 16.04.2021; опубл. 25.08.2021, Бюл. № 34.
9. Пристрій для вимірювання товщини струмопровідної металевої плівки в процесі напилювання у вакуумі. Патент України на корисну модель № 157368. / Тростинський М.М., Топалов А.М., Карпеченко А.А., Герасін О.С., Бобров М.М., Роботько С.П., Хода В.М., Недо А.О. – № u202400179; заявл. 11.01.2024; опубл. 09.10.2024, Бюл. № 41.
Методичні розробки, видані у період з 2018-2026 рр.
Навчальні посібники:
1. Гуров А.П. Навчальний посібник з дисципліні “Теорія автоматичного керування”: у 2 ч. Частина 1 / А.П. Гуров, С.І. Ольшевський, О.О. Черно, Л.І. Бугрім. – Миколаїв: НУК, 2018. – 97 с.
Робочі програми:
1. Черно О.О., Махнова І.В. Робоча програма навчальної дисципліни «Цифрова обробка сигналів і теорія інформації» розроблена для студентів з галузі знань 15 «Автоматизація та приладобудування» за спеціальніс-тю 151 «Автоматизація та комп’ютерно-інтегровані технології», ОПП «Комп’ютерно-інтегровані технології та системи автоматизації». «20» квітня 2023 р. – 14 с.
2. Черно О.О., Махнова І.В. Робоча програма навчальної дисципліни «Елементи і пристрої автоматики та систем управління» розроблена для студентів з галузі знань 17 «Електроніка, автоматизація та електронні комунікації» за спеціальністю 174 «Автоматизація, комп’ютерно-інтегровані технології та робототехніка», ОПП «Комп’ютерно-інтегровані технології та системи автоматизації». «8» січня 2023 р. – 11 с.
3. Черно О.О., Махнова І.В. Робоча програма навчальної дисципліни «Системи управління маніпуляційних роботів» розроблена для студентів з галузі знань 17 «Електроніка, автоматизація та електронні комунікації» за спеціальністю 174 «Автоматизація, комп’ютерно-інтегровані технології та робототехніка», ОПП «Комп’ютерно-інтегровані технології та системи автоматизації». «8» січня 2023 р. – 11 с.
4. Герасін О.С., Покровський М.В. Робоча програма навчальної дисципліни «Інформаційні технології систем управління та захисту інформації» є однією із складових комплексної підготовки фахівців галузі знань 17 «Електроніка, автоматизація та електронні комунікації» спеціальності 174 «Автоматизація, комп’ютерно-інтегровані технології та робототехніка», ОПП «Комп’ютерно-інтегровані технології та системи автоматизації». “12” квітня 2023 р. – 15 с.
5. Покровський М.В., Герасін О.С. Робоча програма навчальної дисципліни «Комп’ютеризоване проектування цифрових електронних схем» розроблена для студентів з галузі знань 17 «Електроніка, автоматизація та електронні комунікації» за спеціальністю 174 «Автоматизація, комп’ютерно-інтегровані технології та робототехніка», ОПП «Комп’ютеризовані системи управління та автоматика». «8» січня 2023 р. – 13 с.
6. Герасін О.С. Робоча програма навчальної дисципліни «Комп’ютеризовані системи штучного інтелекту» є однією із складових комплексної підготовки фахівців галузі знань 17 «Електроніка, автоматизація та електронні комунікації» за спеціальністю 174 «Автоматизація, комп’ютерно-інтегровані технології та робототехніка», ОПП «Комп’ютерно-інтегровані технології та системи автоматизації». “24” січня 2023 р. – 12 с.
7. Герасін О.С. Робоча програма навчальної дисципліни «Теорія систем та системний аналіз» є однією із складових комплексної підготовки фахівців галузі знань 17 «Електроніка, автоматизація та електронні комунікації» за спеціальністю 174 «Автоматизація, комп’ютерно-інтегровані технології та робототехніка», ОПП «Комп’ютерно-інтегровані технології та системи автоматизації». “14” квітня 2023 р. – 12 с.
8. Герасін О.С. Робоча програма навчальної дисципліни «Якість і тестування програмного забезпечення сучасних інформаційних систем» є вибірковим компонентом професійної підготовки освітньої програми. “ 22 ” грудня 2021 р. – 13 с.
9. Герасін О.С. Робоча програма навчальної дисципліни «Теоретичні основи інформаційного аналізу» є вибірковою складовою комплексної підготовки фахівців-бакалаврів. “ 15 ” червня 2021 р. – 13 с.
10. Герасін О.С. Робоча програма виробничої практики. “29” травня 2024 р. – 12 с.
11. Герасін О.С. Робоча програма навчальної дисципліни «Теорія і методи наукової творчості». “30” серпня 2024 р. – 11 с.
Методичні вказівки:
1. Павлов Г.В. Методичні вказівки для виконання лабораторних робіт з дисципліни «Комп’ютеризоване проектування цифрових електронних систем» [друк] / Г.В. Павлов, М.В. Покровський, І.Л. Вінниченко. Миколаїв: НУК. – 2018 р. – 36 с.
2. Павлов Г.В. Методичні вказівки до виконання курсового проекту «Проектування систем управління на базі мікроконтролерів серії AVR» з дисципліни «Мікроконтролери в системах управління» [друк] / Г.В. Павлов, М.В. Покровський, І.Л. Вінниченко. Миколаїв: НУК. – 2018 р. – 34 с.
3. Павлов Г.В. Методичні вказівки курсового проекту „Проектування пристрою на основі ПЛІС” з дисципліни „Комп’ютеризоване проектування цифрових електронних систем” [друк] / Г.В. Павлов, М.В. Покровський, І.Л. Вінниченко. Миколаїв: НУК. – 2018 р. – 32 с.
4. Черно О.О. Моделювання об’єктів та систем: Методичні вказівки до лабораторних робіт / О. О. Черно, А. П. Гуров, В. К. Чекунов. – Миколаїв: НУК, 2018. – 47 с.
5. Черно О.О. Системи управління маніпуляційних роботів: Методичні вказівки до лабораторних робіт / О. О. Черно, А. П. Гуров, М. В. Покровський, О. Л. Авдєєва. – Миколаїв : НУК, 2018. – 28 с.
6. Черно О.О. Методичні вказівки до виконання курсового проекту «Проектування системи автоматичного керування суднового вантажного ма-ніпулятора» : у 2 ч. Частина 1. Теоретичні основи та методика проектування / О. О. Черно, А. П. Гуров, О. Г. Васильєв. – Миколаїв : НУК, 2018. – 45 с.
7. Черно О.О. Методичні вказівки до виконання курсового проекту «Проектування системи автоматичного керування суднового вантажного маніпулятора» : у 2 ч. Частина 2. Приклад розрахунку / О. О. Черно, А. П. Гуров, О. Г. Васильєв. – Миколаїв : НУК, 2018. – 42 с.
Наукові праці, опубліковані у період з 2018-2026 рр.
1. Угольніков Г.Г., Герасін О.С. (2025). Розрахунок кінематики та моделювання роботи лебідки підвісного робота-маніпулятора. Методи та прилади контролю якості, № 1(54). С. 101-108. Фахове видання
2. Мельникова О.Є., Герасін О.С. Інформаційно-обчислювальний комплекс для моделювання кінематики робота-маніпулятора. Матеріали Міжнародної науково-технічної конференції Інформаційні технології в металургії та машинобудуванні – ІТММ 2025, 23-24 квітня 2025, м. Дніпро. С. 324-329. Матеріали конференції
3. Yuriy Kondratenko, Yuriy Zaporozhets, Joachim Rudolph, Oleksandr Gerasin, Andriy Topalov, Oleksiy Kozlov: Modeling of clamping magnets interaction with ferromagnetic surface for wheel mobile robots. International Journal of Computing, Vol.17, Issue 1, Open Access, 2018, pp. 33-46. Scopus
4. Kondratenko Y., Kozlov O., Korobko O., Topalov A. Complex Industrial Systems Automation Based on the Internet of Things Implementation. In: Bassiliades N. et al. (eds) Information and Communication Technologies in Education, Research, and Industrial Applications. ICTERI 2017. Communications in Computer and Information Science, vol 826. Springer, Cham, 2018. – P. 164-187. https://doi.org/10.1007/978-3-319-76168-8_8 Scopus
5. Topalov, A.M., Kondratenko, Y.P., Kozlov, O.V. Computerized Intelligent System for Remote Diagnostics of Level Sensors in the Floating Dock Ballast Complexes. Proceedings of the 14th International Conference on Information and Communication Technologies in Education, Research, and Industrial Applications. Integration, Harmonization and Knowledge Transfer, 2018, Kyiv, Ukraine, Ermolayev, V. et al. (Eds), ICTERI’2018, CEUR-WS, Vol-2105, P. 94-108. Scopus
6. Kondratenko, Y.P., Kozlov, O.V., Topalov, A.M. Fuzzy Controllers for Increasing Efficiency of the Floating Dock’s Operations: Design and Optimization. In: Vsevolod M. Kuntsevich, Vyacheslav F. Gubarev, Yuriy P. Kondratenko, Dmitriy V. Lebedev, Vitaliy P. Lysenko (Eds.), Control Systems: Theory and Applications. Series in Automation, Control and Robotics. River Publishers, Gistrup, Delft, pp. 197-232, 2018. Web of science
7. Kozlov, O. V. Modeling of an automatic control system for a multipurpose mobile robot’s spatial motion [текст] / O. V. Kozlov, G. V. Kondratenko, O. S. Gerasin, H. Mingxin // Електротехнічні та комп’ютерні системи. – К.: Техніка, 2018. – № 28 (104) – С. 248-256. Фахове видання
8. Gerasin O. S., Kozlov O. V., Kondratenko G. V., Mingxin H. Synthesis and study of the mathematical model of a caterpillar mobile robot for vertical movement // Проблеми інформаційних технологій. – Херсон, 2018. – № 01(023) – С. 87-97.Фахове видання
9. Топалов А.М., Кондратенко Ю.П., Козлов О.В. Комп'ютеризована система для дистанційної діагностики датчиків рівня баластного комплексу плавучого доку // Вчені записки ТНУ імені В.І. Вернадського. Серія: технічні науки, 2018. – Том 29 (68) Ч. 2 № 4. – С. 19-25.Фахове видання
10. Kozlov, O.V., Gerasin, O.S., Kondratenko, Y.P., Kushnir, V.O. Automation of the monitoring and control processes of a mobile robot for processing of large inclined surfaces. International Journal “SHIPBUILDING & MARINE INFRASTRUCTURE”, no. 1 (9), 2018, P. 59-66. DOI: 10.15589/SMI. 2018.01.08 Фахове видання
11. Черно О. О. Удосконалений алгоритм керування електромагнітним вібраційним приводом [Текст] / О. О. Черно, А. П. Гуров // Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. – Кременчук: КрНУ, 2018. – Вип. 2/2018 (42). – С. 23 – 29. Фахове видання, Google Scholar
12. Черно О. О. Особливості побудови математичних моделей електромагнітних вібраційних приводів [Текст] / О. О. Черно, А. П. Гуров, Л. І. Бугрім // Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. – Кременчук: КрНУ, 2018. – Вип. 4/2018 (44). – С. 45 − 51. Фахове видання, Google Scholar
13. Гуров А. П. Експериментальне дослідження керованого електромагнітного вібраційного привода [Текст] / А. П. Гуров, О. О. Черно, Л. І. Бугрім, А. В. Поляков // Вібрації в техніці та технологіях. − 2018. №3 (90). − С. 11 − 21. Фахове видання
14. Павлов Г. В. Адаптивная система управления преобразователем частоты на основе резонансного инвертора с нелинейным регулированием [Текст] / Г. В. Павлов, И. Л. Винниченко, М. В. Покровський // «Технічна електродинаміка». – К: ІЕД НАНУ, 2018 р. – № 5. – с. 39–43. Scopus
15. Павлов, Г., Обрубов, А., Вінниченко, І., & Махнов, А. (2024). Розрахунок регулювальних характеристик резонансних перетворювачів методом суперпозиції. Технічна електродинаміка, (4), с. 24-33. Scopus
16. Павлов, Г., Обрубов, А. і Вінниченко, І. (2024). Динамічна модель резонансного перетворювача для впливу зі сторони живлення. Технічна електродинаміка. 2 (Квіт 2024), с. 42-51. Scopus
17. Vinnychenko, D., Nazarova, N., & Vinnychenko, I. (2024). Development of method for frequency regulation of output current in high-voltage transformerless resonant chargers of capacitive energy storage devices. Eastern-European Journal of Enterprise Technologies, 1(5 (127), 6–15.
18. В.З. Войнаш, А.О. Перекос, Т.Г. Кабанцев, Н.В. Данько, І.Л. Вінниченко, О.Д. Рудь. Поліол – синтез наночастинок для магнітних нанорідин. Наносистеми, наноматеріали, нанотехнології, т. 21, вип. 4, 2023, сс. 757-768. Scopus
19. Вінниченко Д., Назарова Н., Вінниченко І. Вплив частоти резонансного кола на потужність трифазного високовольтного безтрансформаторного резонансного зарядного пристрою. Суднобудування та морська інфраструктура, № 1(17), 2023, cc. 4-12. Index Copernicus
20. Вінниченко Д., Назарова Н., Вінниченко І. Дослідження характеристик високовольтного безтрансформаторного резонансного зарядного пристрою ємнісного накопичувача. Технічна електродинаміка, № 2, 2023, c. 21-27. Scopus
21. Д.В. Вінниченко, І.Л. Вінниченко. Визначення інформаційних координат системи керування високовольтних установок електророзрядної обробки вуглецевмісних газів. Технічна електродинаміка, № 5, 2020, c. 84-87. Scopus
22. Pavlov H., Vinnychenko I., Vinnychenko D. “Research of the processes in resonant flyback converter for contactless battery charging,” Shipbuilding and Marine Infrastructure, no. 1(15), 2021, pp. 36-44. Index Copernicus
23. Павлов Г.В., Вінниченко І.Л., Покровський М.В. “Моделювання роботи зворотньоходового перетворювача для безконтактної передачі електроенергії,” Матеріали МНТК «Інновації в суднобудуванні та океанотехніці», Миколаїв: НУК, 2021 р., с. 71 - 75. Scopus
24. Павлов Г.В., Обрубов А.В., Вінниченко І.Л. “Енергоефективна індукційна зарядка суднових тягових батарей”, Матеріали МНТК «Інновації в суднобудуванні та океанотехніці», Миколаїв: НУК, 2021 р., с.9-15. Матеріали конференції
25. Павлов Г.В., Покровський М.В., Вінниченко І.Л. Моделювання роботи послідовно-резонансного перетворювача постійної напруги з число-імпульсним регулюванням. Матеріали ХІ Міжнародної науково-технічної конференції «Інновації в суднобудуванні та океанотехніці», м. Миколаїв. – 2020 р. – С. 71-75. Матеріали конференції
26. G. Pavlov, M. Pokrovskiy, I. Vinnichenko, D. Vinnichenko and I. Zhuk, "Energy Parameters of the Serial-To-Serial Resonant Converter with Pulse-Number Control for Wireless Power Transfer,"2020 IEEE 4th International Conference on Intelligent Energy and Power Systems (IEPS), Istanbul, Turkey, 2020, pp. 296-300. Scopus
27. Павлов Г.В. Визначення параметрів резонансного контуру послідовного одноконтурного знижуючого перетворювача змінної напруги [текст] / Г.В. Павлов, І.Л. Вінниченко, М.В. Покровський// Матеріали МНТК «Інновації в суднобудуванні та океанотехніці» – Миколаїв: НУК, 2019, с. 71 - 75.
28. D. Vinnychenko, I. Vinnychenko and N. Nazarova, "The Influence of the Characteristics of the Resonant Power Source on the Productivity of Electric-discharge Installations for Carbon-containing Gas Processing at Different Pressures in the Reaction Zone," 2020 IEEE 40th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 2020, pp. 767-770. Scopus
29. Честних М. В. Моделювання розподілу електричного поля в металевому розплаві методом розбиття провідника на елементарні комірки / М. В. Честних, В. М. Цуркін, А. В. Іванов, О. О. Черно // Електромеханічні і енергозберігаючі системи. Випуск 4/2021 (56). − С. 35 − 45.
30. Cherno O.O. Simulation of mobile robot clamping magnets by circle-field method [Text] / O.O. Cherno, O.S. Gerasin, A.M. Topalov, D.K. Stakanov, A.P. Hurov, Yu.O. Vyzhol // Технічна електродинаміка. – 2021. – №3. – С. 58 – 64.
31. Chubyk R. Neurocontroller for vibrodrive control of adaptive vibration technological machines [Text] / R. Chubyk, I. Zelinsky, O. Cherno // 2021 IEEE 2nd KhPI Week on Advanced Technology (KhPI Week) Conference proceedings. − P. 278 − 282.
32. Cherno O.O., Hurov A.P., Ivanov A.V. Energy characteristics of the electromagnetic vibration drive with pulse power supply of vibrator coils. Технічна електродинаміка. 2023. №2. С. 53 − 60.
33. Cherno O.O., Kozlov A.Yu. Modeling of a controlled electromagnetic vibration drive with a variable resonant frequency. Технічна електродинаміка. 2023. №4. С. 62 − 71.
34. Жуков, Ю.Д. The current state and prospects of the use of distance learning instruments during study ship engineering /Ю.Д. Жуков, Г.Ю. Гайдай, О.О. Кудін //Інститут цифровізації освіти НАПН України Київ, Information Technologies and Learning Tools, 2022, Vol 87, №1. С. 151 – 165. Web of Science
35. Приходько, Н.В. Нелінійна регресійна модель для оцінювання трудомісткості робіт в суднобудівних проектах на основі двовимірного нормалізуючого перетворення Джонсона / Н.В. Приходько, Л.М. Макарова, О.О. Кудін // Вчені записки Таврійського національного університету ім. В.І. Вернадського. Серія: Технічні науки. – Київ: Таврійський національний університет ім. В.І. Вернадського, 2019. – Том 30(69) № 3. – С 148–152. – ISSN: 2663–5941
36. Приходько, Н.В. Математичні моделі для оцінювання трудомісткості розробки конструкторської документації суден на основі двовимірного перетворення Джонсона / Н.В. Приходько, О.О. Кудін // Вчені записки Таврійського національного університету ім. В.І. Вернадського. Серія: Технічні науки. – Київ: Таврійський національний університет ім. В.І. Вернадського, 2019. – Том 30(69) № 4. – С. 106–111. ISSN: 2663-5941)
37. Кудін О.О. Підвищення достовірності оцінювання тривалості робіт за методом PERT на основі регресійного аналізу. Slovak international scientific journal. - Bratislava, 2020. - №46, VOL.1. - 74 p. - pp. 4-8. - ISSN 5782-5319
38. Kondratenko Y. Neuroevolutionary approach to control of complex multicoordinate interrelated plants / Yuriy Kondratenko, Oleksiy Kozlov, Oleksandr Gerasin // International Journal of Computing, 18(4), 2019, pp. 502-514. Scopus
39. Герасін О.С., Козлов О.В., Кондратенко Ю.П., Скакодуб О.С. Математичне моделювання багатоцільового гусеничного мобільного робота вертикального переміщення. Вчені записки ТНУ імені В.І. Вернадського. Серія: технічні науки. Том 30 (69), Ч. 1, № 3, 2019. – cc. 70 – 79.
40. Gerasin, O.S., Topalov, A.M., Taranov, M.O., Kozlov, O.V., Kondratenko, Y.P., Remote IoT-based control system of the mobile caterpillar robot, CEUR Workshop Proceedings, ISSN 1613-0073, 2020, vol. 2740, pp. 129-136. Scopus
41. Andriy Topalov, Galyna Kondratenko, Oleksandr Gerasin, Oleksiy Kozlov, Oleksiy Zivenko, Information System for Automatic Planning of Liquid Ballast Distribution / Proceedings of the 2nd International Workshop on Information-Communication Technologies & Embedded Systems (ICTES 2020), Mykolaiv, Ukraine (online), November 12, 2020. Edited by Yuriy Kondratenko, Vladik Kreinovich, Dan Simon, Yaroslav Krainyk, CEUR Workshop Proceedings, ISSN 1613-0073, vol. 2762, pp. 191-200. Scopus
42. Cherno O.O., Gerasin O.S., Topalov A.M., Stakanov D.K., Hurov A.P., Vyzhol Yu.O. Simulation of mobile robot clamping magnets by circle-field method. Technical Electrodynamics, No. 3, 2021, pp. 58-64. Scopus
43. O. M. Dubovoy, A. A. Karpechenko, M. M. Bobrov, O. S. Gerasin, O. O. Lymar. Electric arc spraying of cermet coatings of steel 65G-Tic system, Naukovyi Visnyk Natsionalnoho Hirnychoho Universytetu. 2021, (2): 063 – 068. Scopus
44. Kondratenko, Y., Gerasin, O., Kozlov, O., Topalov, A., Kilimanov, B. Inspection mobile robot's control system with remote IoT-based data transmission. Journal of Mobile Multimedia. Special issue “Mobile Communication and Computing for Internet of Things and Industrial Automation”, Vol. 17, Is. 4. 2021. pp. 499-522. Scopus
45. Liu N., Gerasin О., Topalov А., Karpechenko A. Analysis of tasks of monitoring and automatic control of agricultural mobile robot, Управління розвитком складних систем, Київ, 2021. № 47. С. 174 – 179.
46. Weidong Hui, Nengjun Ben, Sergiy Ryzhkov, Andriy Topalov, Oleksandr Gerasin, Yuriy Vyzhol. Improving the efficiency of an eddy current sensor measuring the thickness of a heat-resistant metal film of turbine blades during its deposition in vacuum. Visnyk NTUU KPI Seriia – Radiotekhnika Radioaparatobuduvannia, 2022, Iss. 88, pp. 86 - 97. Web of Science
47. Ben Nengjun, Ryzhkov Sergiy, Topalov Andriy, Gerasin Oleksandr, Yan Xiaolin, Karpechenko Anton and Povorozniuk Oleksii. A Methodology and Information System for Computing and Optimization of Impellers and Vanned Diffusers Geometry Parameters. Applied Computer Systems, vol.27, no.1, 2022, pp.62-74. Web of Science
48. Ben, N., Ryzhkov, S., Topalov, A., Gerasin, O., Yan, G., Yan, Xiaolin and Aleksieieva, Anna. """"Efficiency Improvement of a Centrifugal Compressor Stage with the Parametric Optimization of the Impeller Blades"""" Journal of Applied Engineering Sciences, vol.12, no.2, 2022, pp.159-166. Web of Science
49. Oleksiy V. Kozlov, Yuriy P. Kondratenko, Oleksandr S. Skakodub, Oleksandr S. Gerasin, Andrii M. Topalov. Swarm Optimization of Fuzzy Systems for Mobile Robots with Remote Control, Journal of Mobile Multimedia. Vol. 19, Is. 3. 2023. P. 839-876. Scopus
50. V. Golikov, A. Topalov, O. Gerasin, A. Karpechenko. Modeling a stage of a multistage centrifugal compressor: the blades’ thickness effect of an impeller and a diffuser. ACTA TECHNICA NAPOCENSIS. Series: Applied Mathematics, Mechanics, and Engineering, Vol. 65, Issue IV, November, 2022. P. 531-540. Web of Science
51. Gerasin O.S., Topalov A.M., Zaytsev V.V., Zaytsev D.V., Susak O. M., Savchenko O.V. Information System for Calculating the Shortest Route for a Mobile Robot in a Multilevel Environment based on Unity. ICTERI 2023: Information and Communication Technologies in Education, Research, and Industrial Applications. September 18-22, 2023, Ivano-Frankivs’k. – pp 53-64. Scopus
52. Угольніков Г.Г., Недо А.О., Герасін О.С. Аналіз особливостей сучасних роботів-маніпуляторів. Збірник наукових праць Національного університету кораблебудування імені адмірала Макарова, № 2 (495), 2024. 85-94 с.
53. Герасін О.С., Недо А.О. Огляд сучасних суднових роботів // Інформаційні технології в освіті та науці: Збірник наукових праць ІV міжнародної науково-практичної конференції (Запоріжжя-Мелітополь, 20 травня 2025 р., МДПУ імені Богдана Хмельницького). Випуск 14. Запоріжжя: Видавництво МДПУ ім. Б. Хмельницького, 2025. С. 357-360. Матеріали конференції
54. Герасін О.С., Мазура М.В., Топалов А.М., Недо А.О., Чепіжний А.В., Рясна О.В., Савойський О.Ю. Логістика «останньої милі»: огляд сучасних рішень і перспектив розробки автономних роботів доставляння. Збірник наукових праць Національного університету кораблебудування імені адмірала Макарова, № 2 (500), 2025. С. 216-225. Фахове видання
55. Топалов, А. М., Герасін, О. С., Мануляк, І. З., & Стрілецький, Ю. Й. (2025). Синтез перцептронної структури для задачі розпізнавання елементів тексту. Інфокомунікаційні та комп’ютерні технології, 1(09), 145-153. Фахове видання